Baxter the Fancy Table Setting Robot
December 7, 2016
Overview
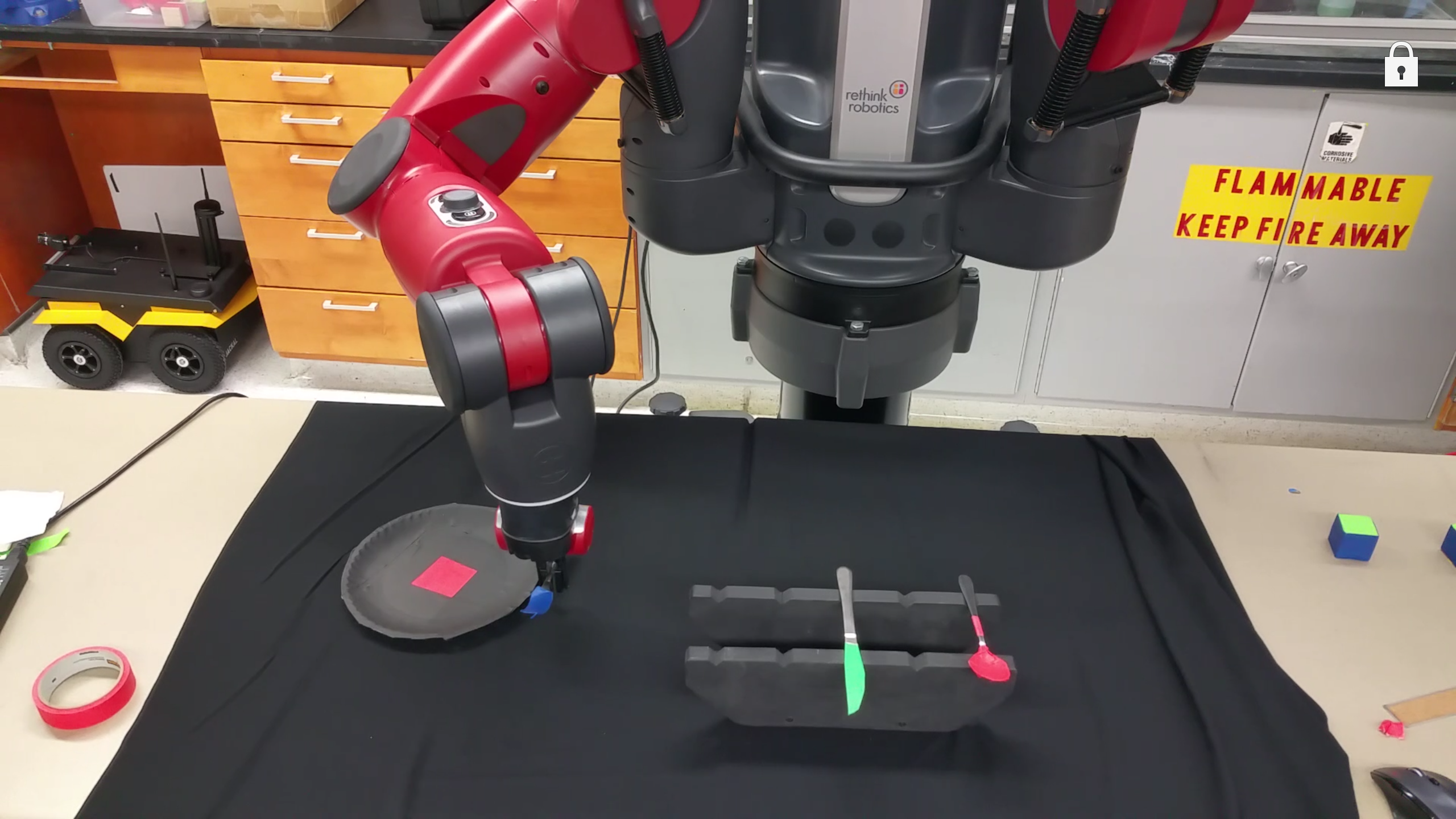
Using Baxter’s grasping, vision, and path planning capabilities, we programmed Baxter to place a fork, knife, and spoon (each color-coded), to a specific position relative to a plate. This was a group final project for ME 495: Embedded Sytems in Robotics at Northwestern University.
I was involved in: writing the master node, measurements/calibrations for parameters in inverse kinematics, and experiments to allow for more robust HSV image processing.
Please visit the following link for a more detailed description and commented code for this project.